伊賀サテライト三重大学地域拠点サテライト
伊賀連携オフィス・伊賀研究拠点
お知らせ
理科関連研修会 ダンボット(浅草技研)完成!
プログラミングが小学校6年で必修になることはこれまでも述べてきました。これに合わせて教材を作成し、テキストも完成させてきました。BASICという言語を用いてのプログラミングです。いうまでも無く、コンピュータの得意な分野は、順次(シ-ケンス)、繰り返し、判断・分岐です。ロボットには、これらすべての操作が必要です。特に判断・分岐になるとセンサー技術が必要です。このロボットには赤外線受光器がセンサーとして使用されています。Rapiroなどはたくさんのセンサーを搭載しているのかな?
ところで、男子小学生にコンピュータに興味を持ってもらう早道は何と言ってもロボットです(いわゆる"つかみ"の部分)。最近は癒し系のロボットもあり女子学生も興味を持ってくれると思います。ロボットもピンキリで高い物は50万円以上します。まずは手始めに浅草技研のダンボットを作ってみました。
ダンボットの特徴は、①サーボモーター4つ(標準装備)で足をコントロールし、歩行、②拡張すると手もコントロールできる、③ラズパイ、ArduinoやPCが不要でテレビリモコン(写真1)で操作できる(メーカーに関係は無さそうです)、④めんどうなソフトのdownloadが無い、⑤価格が7000円程度と手ごろなことです。特に③や④の条件は重要です。中・上級者からみるとなんとバカなんことと思えるでしょうが、これが成否の分かれ目です。ラズパイのソフトのdownloadが上手くいかず、困っている人をよく聞きます。この意味では小学生や理科クラブには格好の教材です。さっそく組み上げてみました。webの記事には「歩行中にひっくり返る」ともいわれていますがそんなことはありません。
 写真1 テレビリモコン
写真1 テレビリモコン
ついでに製作上の注意点をあげておきます。まずは、部品の過不足をチェックして、作り方(インターネット)の2日目を良く読みます。わからない点を確認してください。ビスが1.2mmと小さいので、精密級のドライバー(#0,#00)を利用することが重要です。ピンセットなどもあった方が便利です。約1時間で組み上げることができます。板に部品を貼りつけますが、強力タイプの幅15mm両面テープ(写真2、クッションタイプではない)があればOKです。サーボモーター(写真3)は壊れやすいので無理な力は禁物です。中点検出後は軸に触らない方がいいです。

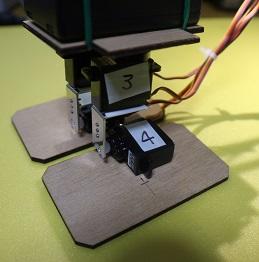
写真2 両面テープ 写真3 サーボモーター
アームと板や金具の固定にネジを使いますが固定先がプラスチックなので、あまり力を入れずに固定することが重要です(ゆるければ締めるのココロ)。サーボについている腕(アーム)を外して金具に固定します。この時、腕を加工してから再度サーボに戻すので上下を間違えないことです(説明書はやや写真が不鮮明、説明書には黒いネジとあるが金属光沢のこのネジのこと)。
完成品を写真4に示します。

写真4 ダンボット
あとは歩行のプログラムの作成です。結局4つのサーボを試行錯誤的に動かして「足の動き」を作ります。たとえば、
①右の足を10mm程度左の足より前に出す
②ロボットの体を右に倒し、左の足を1-2mm程度床からあげる
③左の足を10mm程度右の足より前に出す
④ロボットの体を左に倒し、右の足を床から1-2mm程度あげる
という動作です。なかなか我々の動きは複雑です。これは実際にリモコンでやってみると意味がわかります。下のサーボは靴の部分を上下に、上のサーボは左右に移動させます(図1)。なかなか難しいですが、図1を参考にしてください。
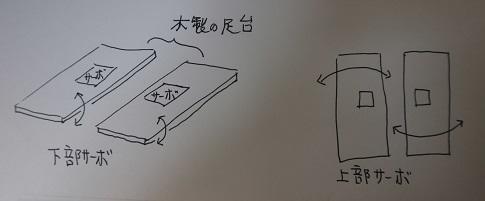
図1
なおこの動きを作るにはサーボに番号を貼って確認しながら行うのがベストです。15min位サーボを動かすとコツがわかってきます。プログラムを何回でも修正すればよいことになります。私は悪戦苦闘の末、1:30で歩行できるようになりました。如何に我々の関節が重要な役目を持っているかが製作を通じてわかります。なお、工作に関しては不明な点はメールで発売元に聞くのが一番です。丁寧に教えてくれます。
さあ、11月の実践でダンボットを使ってみるぞ!
アーカイブを表示